Upline: Infos & Dokus
Elektronik
Regelungstechnik
Untersuchungen an Systemen - SystemeigenschaftenSystemeigenschaften - Untersuchungen an SystemenIn diesem Laborversuch sollen Systeme im Hinblick auf Ihre Eigenschaften untersucht werden und unbekannte Systeme an Hand ihres Verhaltens klassifiziert werden. Für die notwendigen Berechnungen und das Zeichnen der Übertragungsfunktionen bzw. Bodediagramme wird MatLab 7 verwendet.1 Kettenschaltung von SystemenEs soll die Kettenschaltung gleichartiger Systeme untersucht werden. Jedes der Teilsysteme ist durch die Übertragungsfunktion G(p)=1/(1+pT) mit T=0.1s gegeben. Es sollen jeweils für 2-5 sowie 10 verkettete Teilsysteme folgende Aufgaben bearbeitet werden:
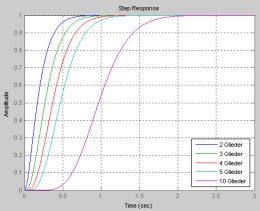
Als Systemtyp läßt sich ein P-T1-Glied (Tiefpaß 1. Ordnung) erkennen, bei dem die Verstärkung 1 beträgt. Weitere Informationen zum P-T1-Glied (Polstelle bei -1/T, keine Nullstelle, Knickkreisfrequenz ?=1/T usw.) finden sich in jeder Grundgliederübersicht. In MatLab definiert man die Übertragungsfunktion mittels tf (transfer function) wie folgt: GP=(tf([1],[T1 1]));Mittels des Befehls step kann die Übertragungsfunktion grafisch dargestellt werden. Hierbei können auch gleich mehrere Übertragungsfunktionen gleichzeitig in ein Diagramm ausgegeben werden. Als letzten Parameter benötigt step eine (dem Quelltext entnehmbare) Definition der Schrittanzahl und des zu betrachtenden Zeitraums, hier t. Um die gewünschten Sprungantworten der 5 Übertragungsfunktionen auszugeben, schreibt man dann folgende Zeile: step(GP^2,GP^3,GP^4,GP^5,GP^10,t);
Nachfolgend der Sourcecode des MatLab-m-Files zu dieser Teilaufgabe. %FHTW-Labor Regelungstechnik I WS2006/07 Versuch 1
%Entwurf und Simulation von Regelkreisen
%Norbert Schröder, Sebastian Buschko
close all; %Ausgabebereich löschen
clc;
%%%%%%%%%%%%%%%>----- Aufgabe 3.1 -----<%%%%%%%%%%%%%%%
%gegeben
T1=0.1;
%Übertragungsfunktion tf (transfer function)
%allgemein: für h(s)=n(s)/d(s) schreibt man h=tf(n,d)
%Beispiel: für h=1/(1+2s) würde man h=tf([1],[2 1]) schreiben
%danach ergibt sich für ein nicht normiertes GP:
GP=(tf([1],[T1 1]));
T_STOP=3; %betrachtete Zeit in Sekunden
t=linspace(0,T_STOP,2000); %linspace(start,stop,schrittzahl);
hold on;
step(GP^2,GP^3,GP^4,GP^5,GP^10,t); %zeichnet die Übertragungsfunktionen
legend('2 Glieder','3 Glieder','4 Glieder','5 Glieder','10 Glieder',...
'Location','SouthEast');
hold off;
grid;
figure(2); % step(GP,t) ohen ";" gibt die Formel der Übertr.fkt. aus
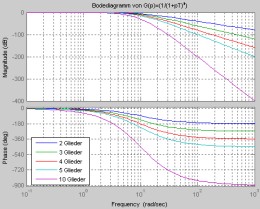
bode(GP^2,GP^3,GP^4,GP^5,GP^10)
grid;
title('Bodediagramm von G(p)=(1/(1+pT)^n)');
legend('2 Glieder','3 Glieder','4 Glieder','5 Glieder','10 Glieder',...
'Location','SouthWest');
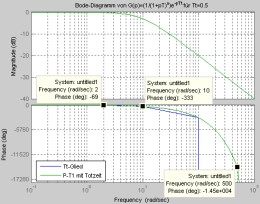
2 Bestimmung von ErsatzparameternDa vorgegebene Systeme oft durch vereinfachte Systeme mit möglichst ähnlichem Verhalten abgebildet werden müssen, gibt es verschiedene Verfahren hierfür. Eines davon ersetzt ein System höherer Ordnung durch ein Verzögerungsglied erster Ordnung mit einer Totzeit (P-T1-Glied+Tt-Glied). Die Übertragungsfunktion dafür lautet:Gers(p)=V/(1+pTG)e-pTu Folgende Aufgaben sind hierbei zu bearbeiten:
Y(p) = U(p) G(p) Y(p) = V (1 / (p(1+pTG))) e-pTu mit V=1 (Sprunghöhe) Die Rücktransformation in den Zeitbereich ergibt: 1 / (p(1+pTG)) <--> 1-e-t/Tg mit t:= t-TU (lt. Bartsch, Kleine Formelsammlung der Mathematik) e-pTu <--> δ(t-TU) (Diracimpuls, Verschiebungssatz der Laplace-Transformation) Da nach dem Verschiebungssatz für die Laplace-Transformierten keine Faltung notwendig ist, ergibt sich als Sprungantwort: y(t) = (1-e-(t-Tu)/Tg) δ(t-TU) Für die unter 4. geforderte Verkettung von 5 bzw. 10 P-T1-Gliedern wäre eine Faltung im Zeitbereich erforderlich. Die Übertragungsfunktion für 5 Glieder sieht wie folgt aus: G(p) = V^5 / (p^5 + 5p^4 + 10pł + 10p˛ + 5p + 1) Da die Berechnung der Formel der Sprungantwort für die Verkettung nicht gefordert ist, lassen wir die für 10 Glieder weg. MatLab erledigt die grafische Darstellung mittels der entsprechenden Übertragungsfunktionen an gegebener Stelle.
Herleitung der allgemeinen Formeln für die Ersatzparameter Die Ersatzparameter ergeben sich aus den Punkten A(t1,x1) bei 25% der max. Amplitude und B(t2,x2) bei 75% der max. Amplitude. y(t-TU) = V(1-e-(t-Tu)/Tg) mit V=x~ x1,2 = x~(1-e-(t1,2-Tu)/Tg) Fortsetzung folgt ... ;) |